162 total views
Det finnes flere alternative teknologier og produkter som kan tilby Virtuelle Private Nett (VPN), og i denne artikkelen skal vi studere WireGuard (WG). WG sies å være enklere å sette opp og bruke enn f.eks. OpenVPN, som vi har omtalt i en tidligere artikkel.
For en innledende forklaring om hva et VPN kan tilby, og en presentasjon av noen brukstilfeller, vil jeg foreslå de første par sidene av denne artikkelen.
Med en forutsetning om litt bakgrunnskunnskap om tunneler og røde/sorte endepunkter skal vi gjennomgå arkitekturen til WG og hvordan disse tre brukstilfeller kan løses:
- Host-til-host: To maskiner ønsker beskyttet kommunikasjon seg i mellom, nettverkene på begge sider er ikke en del av løsningen. Maskinenes IP-adresser er kjent og konstante.
- Road Warrior: Et kallenavn på en omreisende enkeltmaskin som trenger adgang til et beskyttet nettverk. En omreisende medarbeider som trenger adgang til bedriftens interne forretningssystemer fra hoteller og flyplasser er et eksempel på dette brukstilfellet.
- Nett-til-nett: Flere interne nett ønskes sammenkoplet med beskyttede forbindelser slik at ressurs- og klientmaskiner kan kommunisere som om de var ett felles nett.
Wireguard er enklere enn OpenVPN
Underveis i denne artikkelen WG bli sammenlignet med OpenVPN, som er populær og utbredt, men har ord på seg for å være komplisert å sette opp. WG er et enklere produkt, som i mindre grad løser alle behovene i sine konfigurasjonsfiler. WG forutsetter at du selv, eller hjelpeprogrammer, setter opp nettverksporter, rutingtabeller og brannvegger med riktige parametre.
WG er en nettverksport
WG oppretter en nettverksport (network interface) med bestemte egenskaper, og den kan kommunisere med en WG nettverksport i en annen maskin. For at denne kommunikasjonen kan foregå over et ubeskyttet nettverk (slik som Internet er) er det valgt å lage en tunnel hvor IP-pakkene som utveksles (kalt røde) blir kryptert og lagt inni en annen IP-pakke (kalt sorte). De røde IP-adressene er adskilt fra de sorte IP-adressene (tilhører ulike subnett). De sorte IP-adressene er de “virkelige” IP-adressene som ruterne i Internet bruker for å sende pakken til riktig mottaker, mens de røde IP-adressene vises bare hos de partene som kommuniserer. Figuren nedenfor illustrerer dette forholdet.

Innledningsvis vil jeg beskrive oppsettet av WG i Linux-maskiner. Dette gir best forståelse av hvordan de ulike delene av et VPN spiller sammen. Siden vil jeg vise hvordan WG settes opp i Windows, ChromeOS, Android og iPadOS. For å sette opp en WG nettverksport med rød adresse 10.10.0.1/24 må du være i “sudo”-modus og skrive slik i et Linux konsollvindu:
$ sudo bash
# ip link add wg1 type wireguard
# ip addr add 10.10.0.1/24 dev wg1
# ip link set up wg1(Kommandolinjer som må skrives i “sudo”-modus er angitt med #-tegnet, ellers $-tegnet.)
Overføringen av IP-pakker skal beskyttes
En god beskyttelse av overføringen gjennom et ubeskyttet nett skal sikre:
- Konfidensialitet: Ingen kan tilegne seg kunnskap om den røde IP-pakken gjennom avlytting av overføringen
- Integritet: Ingen kan endre innholdet i den røde IP-pakken uten at det oppdages hos mottakeren.
- Autentisitet: Det skal være mulig for mottakeren å fastslå avsenderens identitet.
Alt dette kan man oppnå gjennom kryptering. WG benytter seg av å kryptere med et nøkkelpar, dvs at mottaker og avsender benytter ulike nøkler. Avsender bruker mottakerens offentlige nøkkel for å kryptere en rød IP-pakke før sending, og mottakeren benytter sin private nøkkel for å gjenopprette (dekryptere) innholdet Tilsvarende bruker avsenderen sin private nøkkel for å påføre sendingen sin signatur, som kan kontrolleres av mottakeren med avsenderens offentlige nøkkel..
Kommunikasjon mellom to maskiner gjennom en WG-tunnel vil ikke forholde seg til navn eller andre identifikatorer på partene, men kun de offentlige nøklene. Fordi motparten presenterer data signert med sin private nøkkel, vil mottageren av denne signaturen forvisse seg om at det er eieren av den offentlige nøkkelen som sender, ikke en som bruker en offentlig nøkkel som tilhører en annen. Sikkerheten i en slik metode hviler på at den private nøkkelen ikke blir stjålet eller delt med andre, og det er en forutsetning som faktisk er ganske krevende å oppnå.
Jeg har tidligere skrevet en artikkel om Autentisering, og anbefaler å lese den om disse mekanismene er ukjent.
For å fremskaffe et nøkkelpar skriver du følgende inn i et Linux-konsoll (WG foretrekker at du legger disse filene på filområdet /etc/wireguard):
$ sudo bash
# cd /etc/wireguard
# wg genkey | cat > privkey
# wg pubkey < privkey > pubkey
# chmod 400 privkey Den offentlige nøkkelen (pubkey) deles fritt med andre, mens din private nøkkel (privkey) er din hemmelighet. Den skal lagres slik at ingen andre kan lese den.
WG og klienten må kjenne hverandres offentlige nøkler for å gi denne beskyttelsen
Teksten videre vil kreve noe kunnskaper om hvordan IP-adresser representeres og inngår i subnett og rutingtabeller. Om dette er ukjent stoff kan jeg anbefale denne artikkelen nå. Den gir nødvendig bakgrunninformasjon.
Ved overføring av en IP-pakke må avsenderens maskin kjenne:
- egen privat nøkkel, for å påføre en digital signatur,
- motpartens offentlige nøkkel, for å kryptere dataene
TIlsvarende må mottakeren vite:
- egen privat nøkkel, for å dekryptere dataene
- motpartens offentlige nøkkel, for å kontrollere avsenderens signatur
Partene må konfiguere WG for dette formålet eksempelvis på denne måten:
# wg set wg1 listen-port 51820 private-key privkey \
peer <offentlig-nøkkel> allowed-ips 10.10.0.2/32 \
endpoint 192.168.9.12:51820I dette eksemplet skrives det at
- Parten ønsker å lytte etter mottatte IP-pakker på UDP port 51820
- Den private nøkkelen ligger i filen privkey
- Motpartens røde IP-adresse er 10.10.0.2/32
- Motpartens offentlige nøkkel er angitt bak ordet peer
- Motpartens sorte endepunkt (adresse:port) er 192.168.9.12:51820
Et praktisk eksempel – Host-til-Host
En demonstrasjonsvideo for dette eksemplet:
Den enkleste konfigurasjonen, nemlig å kople opp en beskyttet kanal mellom to parter, skjer på følgende måte. Her viser jeg konfigurasjonsfilene etter hverandre, merk at de sorte ip-adressene (192.168.2….) er kun eksempler, og må endres for bruk andre steder.
Vi forutsetter videre at nøklene er bli generert på forhånd, og at partenes private nøkler ligger i filen privkey. Den offentlige nøkkelen er med i konfigurasjonen hos motsatt part, så partene må ha utvekslet disse verdiene på forhånd.
Venstre maskin – wg-left.sh:
$ sudo bash
# ip link add wg1 type wireguard
# ip addr add 10.10.0.1/30 dev wg1
# ip link set up wg1
# cd /etc/wireguard
# wg set wg1 listen-port 51820 private-key privkey \
peer 3aTXg7SbFDOc7rbscBUqKZsRqoHpvowHRkb+mNwuXRk= \
allowed-ips 10.10.0.2/32 \
endpoint 192.168.2.124:51820Høyre maskin – wg-right.sh
$ sudo bash
# ip link add wg1 type wireguard
# ip addr add 10.10.0.2/30 deb wg1
# ip link set up wg1
# cd /etc/wireguard
# wg set wg1 listen-port 51820 private-key privkey \
peer 9/c6yQloq6h3RRxyPrHHXO2b72GFT6aN5hGGRPY6YXw= \
allowed-ips 10.10.0.1/32
Etter at disse kommandofilene er utført på begge partene kan de “pinge” hverandre med hverandres røde adresser: left pinger 10.10.0.2 og tilsvarende 10.10.0.1 for right. Om vi gir kommandoen sudo wg på left, vil utskriften se slik ut:
root@anders-medion:/home/anders# wg
interface: wg1
public key: 9/c6yQloq6h3RRxyPrHHXO2b72GFT6aN5hGGRPY6YXw=
private key: (hidden)
listening port: 51820
peer: 3aTXg7SbFDOc7rbscBUqKZsRqoHpvowHRkb+mNwuXRk=
endpoint: 192.168.2.124:51820
allowed ips: 10.10.0.2/32Dynamisk sort adresse i endepunktet
En detalj som er nødvendig å merke seg er at right ikke har oppgitt noe endpoint for sin motpart. Den kan følgelig ikke pinge left uten denne informasjon, men den tilegner seg den informasjonen første gang den mottar et ping fra left. Det kan vi fastslå ved å gi wg-kommandoen på right før og etter den har mottsatt sin første ping fra left. Dette er en nyttig detalj dersom den ene parten ikke har fast IP-adresse, noe som er tilfelle når man kopler seg til Internet fra hoteller og restauranter. En slik part kalles ofte for Road Warrior, og neste avsnitt vil beskrive hvordan vi kan lage en konfigurasjon med flere Road Warriors.
Avslutningsvis vil vi påpeke to egenskaper med denne konfigurasjonen: (1) Den er mer nyttig enn den først synes, fra et terminalkonsoll i left kan en bruker logge seg inn på right, og deretter benytte seg av tjenester og innlogging tilgjengelig i right sitt beskyttede nettverk. (2) Én av de to partene må ha en adresse som kan nås via en internet-adresse. Enten ved maskinen faktisk står med en virkelig Internet IP-adresse, eller bak en brannvegg (med Internet IP-adresse) som har satt opp port forwarding til maskinen.
Road Warriors – for å bruke hovedkontorets interne systemer
En bedrift har sine forretningssystemer som trolig er beskyttet med passord for innlogging, men et enkelt passord gir for dårlig beskyttelse mot angrep fra Internet. En bedre beskyttelse kan de oppnå med et VPN. En Road Warrior konfigurasjon vil skille seg fra det i forrige avsnitt ved at:
- Det er ikke kun én Road Warrior som har ukjent IP-adresse og som vil kople seg til en sentralt plassert part, men flere. Det er altså behov for lagring av flere offentlige nøkler og røde IP-adresser.
- Det er ikke den sentralt plasserte parten som kjører de ønskede forretningssystemene, så den sentrale parten må rute trafikken videre inn i det beskyttede nettet.
Den sentrale parten blir heretter kalt en VPN-ruter. Klientkonfigurasjonen (som brukes av den omreisende parten) trenger de samme opplysningene som før, men vi skal nå lagre dem i en konfigurasjonsfil.
Her følger en demonstrasjonsvideo om Road Warrior-konfigurasjon:
WG konfigurasjonsfil
Vi vil konfigurere VPN-ruteren med en konfigurasjonsfil fremfor bruk av direkte kommandoparametre. I en konfigurasjonsfil har vi plass til å liste opp en rekke motparter og deres offentlige nøkler og røde IP-adresser. Konfigurasjonsfilen (i dette tilfellet kalt wg1.conf) kan se slik ut:
[Interface]
PrivateKey = oOWwjJHkckYU3uNgI5UoJpLENPjtDa4bvW3Rj82bV0M=
Listenport = 51820
[Peer]
# Desktop Linux
PublicKey = M0YMsn88TZPEedCKzI33RhdS9VWR0qpXm6e2zhQBpSA=
allowedIPs = 10.0.1.2/32
[Peer]
# Raspberry Pi 5
PublicKey = 60cdqn+GgVodrNDdfPVCv39aZCvpeNKm75kF2lJC+Fs=
allowedIPs = 10.0.1.3/32
[Peer]
# Medion Laptop
PublicKey = n/Eriwa1pZ7T2R5Qd4n96tQ8Ptq0SUfblIY8ZvswehY=
allowedIPs = 10.0.1.4/32Og selve kjørefilen (shell-skriptet) kan se slik ut (må kjøres i sudo-modus):
ip link del wg1 || true
ip link add wg1 type wireguard
ip addr add 10.0.1.1/24 dev wg1
wg setconf wg1 wg1.conf
ip link set up wg1
Husk å legge disse filene på /etc/wireguard. Merk at konfigurasjonsfilen ikke inneholder opplysninger om andres endpoint, av samme grunn som nevnt i forrige avsnitt. Disse partene kan nemlig kople til VPN-ruteren med ulike IP-adresser hver gang.
Setningen allowedIPs angir hvilke IP-adresser som VPN-ruteren kan bruke for å sende til en klient med en bestemt offentlig nøkkel. Ved å angi dette som en enkelt adresse, angitt med /32 prefiks, tvinges klienten til å bruke denne røde adressen, og på den måten unngå at flere klienter bruker samme røde IP-adresse.
Denne konfigurasjonen tillater tre Road Warriors å kople seg til, presentere sin offentlige nøkkel, sin røde IP-adresse og sitt endepunkt (sorte IP-adresse og UDP port). I tillegg presenterer de et dataelement kryptert med sin private nøkkel, for å bevise at de “eier” denne nøkkelen.
Konfigurasjonen av en Road Warrior
Klientkonfigurasjonen vil nå bruke en egen konfigurasjonsfil. I det følgende ekemplet skal klienten kunne adressere IP-pakker til nettverket “bakenfor” VPN -ruteren, og dette må deklareres i en allowed-ips-setning som et IP subnett, i dette eksemplet 192.168.2.0/24. Det samme subnettet må legges inn i maskinens rutingtabell med ip route add...Vi lar shell-skriptet for klientkonfigurasjonen se slik ut:
ip link del wg1 || true
ip link add wg1 type wireguard
ip addr add 10.0.1.4/24 dev wg1
ip link set up wg1
ip route add 192.168.2.0/24 via 10.0.1.4
wg setconf wg1 wg1.confSkriptet henviser til konfigurasjonsfilen wg1.conf, innholdet av den er som følger:
[Interface]
PrivateKey = n/Eriwa1pZ7T2R5Qd4n96tQ8Ptq0SUfblIY8ZvswehY=
ListenPort = 51820
[Peer]
PublicKey = 9gUrCU32BQS4pzBe+jbs1P5T1VMDcti11tg7VkRYH0U=
Endpoint = hos.fongen.no:51820
AllowedIPs = 10.0.1.0/24
AllowedIPs = 192.168.2.0/24I dette tilfellet er det [Interface]-delen som beskriver konfigurasjonen av egen maskin, mens [Peer]-delen beskriver VPN-ruteren. Forøvrig er all informasjon i disse to filene allerede drøftet, så ingen ytterlig forklaring vil bli gitt.
VPN-ruteren må videresende IP-pakker
En Road Warrior kan altså kople seg til VPN-ruteren på nevnte måte, men er først og fremst interessert i å kommunisere med et internt/beskyttet nett innenfor ruteren, koplet til ruteren gjennom en nettverksport. For dette eksemplet kaller vi denne nettverksporten for eth0. IP-pakker med mottakeradresser i det interne nettet skal sendes dit, og IP-pakker i motsatt retning skal sendes gjennom WG-tunnelen tilbake til klienten. To kommandoer i VPN-ruteren samt en mulig konfigurasjon av stedets brannvegg vil fikse dette:
- Ruteren må settes til å rute IP-pakker. Skriv denne kommandoen i sudo-modus:
# echo 1 > /proc/sys/net/ipv4/ip_forward
Denne innstillingen må gjøres igjen for hver oppstart, men du kan også redigere filen/etc/sysctl.conf(evt. opprette den) og skrive inn setningennet.ipv4.ip_forward = 1og deretter restarte maskinen. - IP-pakkene som rutes fra VPN -ruteren til det interne nettet vil ha avsenderens røde IP-adressen som avsenderadresse, og maskinene der vil ikke uten videre vite hvordan IP-pakker med slike adresser skal sendes tilbake til VPN-ruteren. En løsning på dette problemet er at avsenderadressen på IP-pakkene fra en RoadWarrior gis VPN-ruterens adresse med en såkalt NAT-funksjon. Les denne artikkelen for å lære om NAT dersom dette er ukjent stoff. NAT-funksjon på
eth0lages med denne kommandoen i sudo-modus:# iptables -t nat - A POSTROUTING -o eth0 -j MASQUERADE - Det beskyttede nettet (som VPN-ruteren befinner seg i) vil mest sannsynlig være isolert fra Internet gjennom en brannvegg. For at IP-pakker utenfra skal finne veien til VPN-ruteren kreves en konfigurasjon i brannveggen som kalles port forwarding. Dette innebærer at IP/UDP-pakker med brannveggens IP-adresse og UDP-portnummer (i dette eksemplet) 51820 vil sendes inn i nettet med VPN-ruterens IP-adresse. Alle hjemmerutere og brannvegger har denne muligheten.
Bruk av WG på andre plattformer enn Linux
Programvare som støtter en Road Warrior finnes på flere plattformer enn kun Linux. Her følger erfaringer med et antall av dem
Android/iPadOS
Appene for RoadWarrior for iPadOS og Android kommer fra samme utvikler, og de er så lik hverandre at vi ikke gir begge en separat omtale.
Jeg har installert og testet Android-appen “WireGuard” fra “Wireguard development Team” (det høres ut som en offisiell app). Versjonen jeg testet var 1.0.2. For å opprette og konfigurere et VPN, gjør følgende:
- Fra grunnbildet i appen, trykk på ‘+’-tegnet nederst til høyre for å opprette et VPN. I dette tilfellet, velg “Create from scratch”. Appen kan generere et nøkkel om du ikke ønsker å skrive inn en eksisterende.
- I skjemaet som nå vises skrives følgende informasjon:
- Name – selvvalgt navn (uten mellomrom)
- Private key – Skriv inn en du har, eller få den laget av appen
- Public key – Denne avledes av privatnøkkelen, men du kan kopiere fra dette feltet for å sende til andre.
- Adresses – Din røde IP-adresse. Valgt fritt, men må være i samme IP subnett som VPN-ruterens adresse
- Listen port – 51820 er en fin verdi
- DNS servers – Om det er behov for å benytte en DNS-tjeneste i det interne nettet, kan du skrive inn dens IP-adresse her.
- [Peer] Public key– VPN-ruterens offentlige nøkkel, tilsendt.
- PreShared key – Ikke brukt i disse eksemplene. Kan gi styrket kryptografisk beskyttelse
- PersistentKeepalive – Ikke brukt i disse eksemplene. Kan lage “hjerteslag” for å holde brannveggen “åpen”
- Endpoint: VPN -ruterens sorte endepunkt. En “virkelig” IP-adresse
- AllowedIPs – subnett som klienten ønsker å adressere “bak” VPN-ruteren. Merk at om en i dette feltet skriver 0.0.0.0/0, vil all trafikk fra klientmaskinen sendes via VPN-ruteren (som er satt opp til å viderensende til Internet). Da oppnår man beskyttelse av sin egen Internet-trafikk i tillegg til det interne beskyttede nettet bak VPN-ruteren.
Trykk på diskettsymbolet for å lagre, og du kan siden slå denne oppkoplingen av og på.
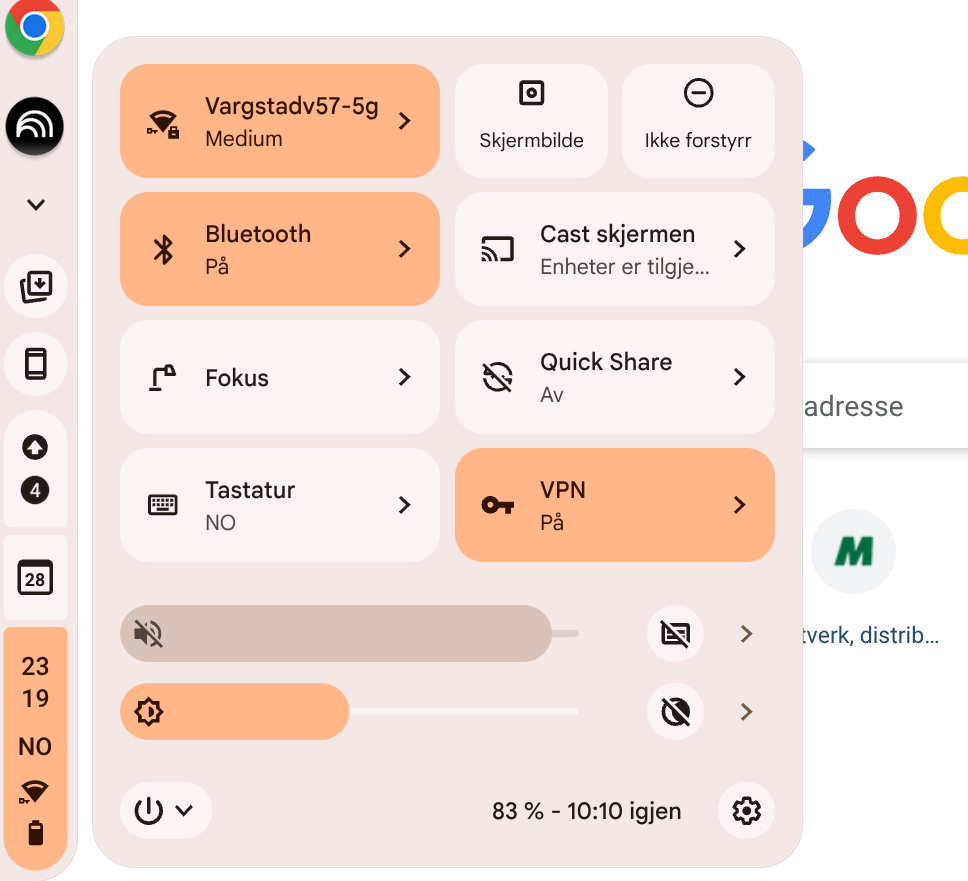
ChromeOS
WireGuard er forhåndsinstallert i ChromeOS, som er operativsystemet i en Chromebook. På panelet for for bl.a. nettverksinnstillinger (se bilde nedenfor) er det en knapp for “VPN”, og bak den knappen ligger det mulighet for å opprette nye VPN-instanser merket “+”. Panelet for å konfigurere et VPN ber om de samme opplysningene som i konfigurasjonsfilene for Linux.
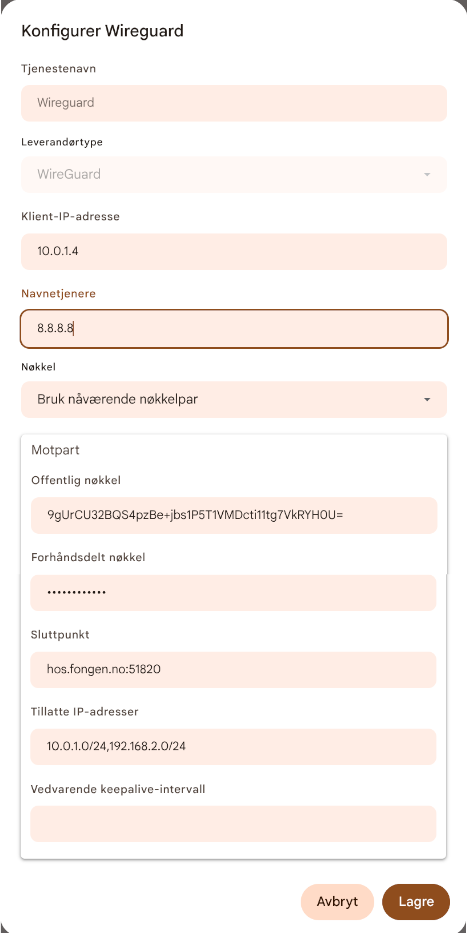
Opplysningene som kreves for en konfigurasjon av et WG VPN er disse (lskjemaet leses fra toppen og ned)
Tjenestenavn – selvvalgt
Leverandørtype – “WireGuard”
Klient IPadresse – klientens røde IP-adresse, i samme subnett som VPN-ruterens.
Navnetjenere – DNS-tjener i det beskyttede nettet, ellers ubrukt.
Nøkkel – Om det allerede er laget nøkler, velg “jeg har et nøkkelpar”, og kopiere inn privatnøkkel i feltet under (ikke vist på bildet). Man kan også velge “generer et tilfeldig nøkkelpar”. Når skjemaet er utfylt og “kople til” er trykket, gå tilbake til panelet og finne den offentlige nøkkelen som må oppgi til VPN-ruterens administrator
Motpart/offentlig nøkkel – her kopieres inn VPN-ruterens offentlige nøkkel
Forhåndsdelt nøkkel – ikke brukt i disse eksemplene
Sluttpunkt – VPN-ruterens sorte IP-adresse og UDP portnummer
Tillatte IP-adresser – VPN-ruterens røde IP-adresse, og det subnettet du ønsker adgang til. Om du velger å skrive 0.0.0.0/0, vil all trafikk, også til Internet forøvrig, gå via VPN-ruteren.
Vedvarende keepalive-intervall – kan stå tomt for denne gang
Se knappene for “Kople opp” og “Kople ned”. Nå bør ressursene i det aktuelle nettet være tilgjengelig. Også Linux-konsollet og Android-apper på Chromebook får adgang til de samme ressursene.
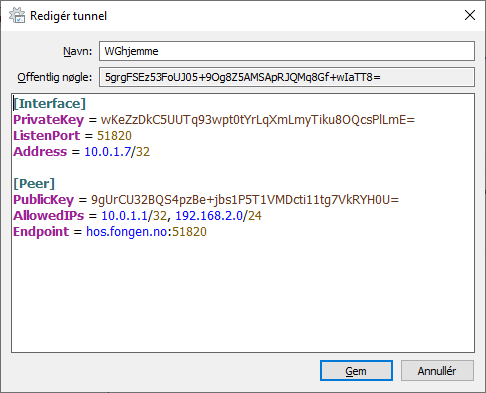
Windows
WG er ikke ferdig installert i Windows, og må lastes ned og installeres separat. Appen kan lastes ned fra https://download.wireguard.com/windows-client/ og installeres på vanlig måte.
Når WG for Windows startes, viuses et vindu som lister opp eksisterende WG-konfigurasjoner, og som med tastetrykket Ctrl-N vil generere nøkler for en ny WG-konfigurasjon og vise redigeringvinduet som er vist nedefor. I bildet nedenfor vises de vante opplysningene fra Linux-konfigurasjonen. Her brukes en konfigurasjonsfil for klienten, slik at [Interface]-delen nå beskriver maskines egen konfigurasjon, mens [Peer]-delen viser endepunkt og offentlig nøkkel for VPN-ruteren. Tilbake til startvinduet finnes en “Aktivér”-knapp som kopler opp WG-tunnelen. Som tidligere må den genererte offentlige nøkkelen bli installert i VPN-ruterens konfigurasjon på foirhånd. Et nytt element i konfigurasjonsfilen er “Address”-linjen, som inneholder klientens røde IP-adresse. Ellers er dette helt likt Linux-konfigurasjonen, med den forskjell at det ikke er nøvendig å sette opp rutingtabeller selv.
WireGuard i nett-til-nett konfigurasjon, et fyldig eksempel
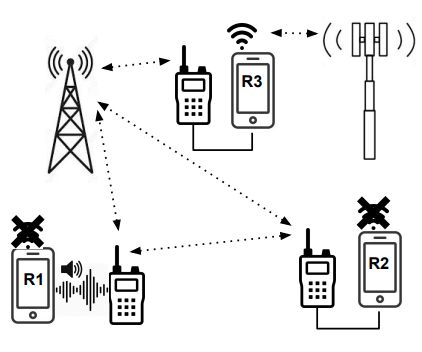
Som nevnt gir WireGuard en en beskyttet link mellom to endepunkter, og befatter seg ikke med f.eks. ruting. Når vi ønsker at interne nett skal knyttes sammen slik at maskinene i alle nettene skal kunne kommunisere, trenges en ruter i hvert nett og linker mellom dem. En slik konfigurasjon kan vises på denne måten:

IP-adressene i hvert av de 4 nettene på figuren må danne separate subnett, og ruterne må kjenne til adressene på alle “grenene”. Figuren over viser slik informasjon, men hver enkelt maskin trenger også informasjon om hvilken “vei” IP-pakkene skal sendes for å nå mottakeren i flere hopp. Les gjerne denne artikkelen dersom dette ikke er kjent stoff.
Linken mellom R1 og R2 på figuren over bør beskyttes om den går gjennom offentlige nettverk, og VPN-teknologi er godt egnet for det formålet. Tidligere i denne artikkelen brukte i WireGuard for å beskytte linken mellom to maskiner, og vi skal bruke et lignende oppsett for å knytte sammen VPN-rutere. Vi skal altså ta med elementer fra Host-til-host og RoadWarrior løsningene videre.
Vi velger å sette opp et fyldig eksempel: Tre nettverk, A, B og C, skal knyttes sammen med beskyttede WG-linker. Sammenknytningen skal gjøres med bruker av VPN-rutere som både håndterer WG-parametrene og videresending av IP-pakker basert på rutingtabeller.
I tillegg skal en gruppe Road Warriors kunne kople seg til fra hoteller og flyplasser og få adgang til ressurser i alle de tre andre nettverkene. Her kommer erfaringene med Road Warrior eksemplet tidligere i artikkelen til nytte.
PDF-tegningen nedenfor er stor og viser arkitekturen i denne nettverket, og utdrag av rutingtabellene og WG-parametrene som inngår. Trykk på Download-knappen for å se tegningen i full størrelse. De sorte linjene er linker som bruker Internet og må derfor beskyttes. En full presentasjon av konfigurasjonsfilene for hver maskin i dette nettverket vil presenteres på slutten av denne artikkelen.
Rutingtabellene på figuren kan studeres for å fastslå at IP-pakker sendes til riktige røde nettverk (A-D) basert på deres IP-adresse. Detaljer knyttet til nøkkelutveksling og konfigurasjon av WG-parametre er i noen grad utelatt, men følger de samme reglene som ble presentert i gjennomgangen av Host-til-Host kommunikasjon. På figuren representerer noden A-h1 en enkel brukernode (host) i nett A, men svitsj-symbolet indikerer at mange maskiner kan befinne seg i nett A, og de vil ha identisk konfigurasjon.
IP-adressene i nettverkene A, B og C følger reglene for IP-subnett og gjør det overflødig å benytte noen NAT-funksjoner. Basert på rutinginformasjonen i maskiner og VPN-rutere vil alle adresser som forekommer i dette samlede nettet finne frem til sin adressat.
Noe annet gjelder RoadWarriors som utgjør nett D. De har alle mulig adresser ettersom hvor de befinner seg, og addresser som endrer seg fra gang til gang. Dette er ikke et problem for WG, som gjerne setter opp forbindelser under slik forhold, men det finnes ingen fornuftig metode for å sørge for at IP-pakker med alle slags ukjente avsenderadresser skal finne tilbake til riktig sted når de ankommer på denne måten. Derfor er det plassert en NAT-enhet i utgangen fra D-vpn, på samme måte som i RoadWarrior-eksemplet tidligere.
En kort sammenligning mellom OpenVPN og WireGuard
WireGuard foreslår en enklere idé om å sette opp en tunnel mellom to maskiner, eksponert gjennom vanlige nettverksporter. Den bruker kryptonøkler på en enklere måte enn hva man gjør i et “Public Key Infrastructure” (PKI), men mister da også noen av fordelene som et PKI faktisk tilbyr:
Et PKI vil bruke digitale sertifikater for å attestere hvilken person/bruker/gjenstand den offentlige nøkkelen tilhører. OpenVPN kan settes opp til å godta offentlige nøkler som er sertifisert med bestemte navneregler eller utsteder. Det gjør det unødvenig å registrere hver klient direkte inn i VPN-tjenerens konfigurasjon, noe som gjør administrasjonen av et stort VPN med mange klienter mer håndterlig. Et prinsipp jeg fremholder er at “infrastrukturkomponenter skal ikke drive tillitshåndtering”, og det oppnår vi ved å skille trafikkhåndtering og brukeradministrasjon slik OpenVPN tilbyr. Grunnen til at et slikt skille er nødvendig beror på at de to oppgavene utføres av ulikt personell med ulik kompetanse og ulike ansvarsområder, og som ikke skal sitte og redigere samme konfigurasjonsfil.
En veldig viktig egenskap med nøkkelsertifikater (og en av hovedgrunnene til at nøkkelsertifikater ble oppfunnet) er at man unngår man-in-middle angrep fordi nøklene er uløselig knyttet til en identifikator (som representerer eieren av nøkkelen). Den sikkerheten tilbyr ikke WireGuard, og overføringen av offentlige nøkler mellom VPN -tjeneren og klientene (og alle parter som vil kommunisere via WG) må skje via autentiserte kanaler som hindrer partene å utgi seg for andre.
Gitt at dette blir håndtert på en trygg måte, så unngår WG den jungelen av interoperabilitetsproblemer som herjer i anvendelser som benytter PKI: Sertifikater kan utformes og valideres på et utall forskjellige måter. Det resulterer i at sertifikater laget for én anvendelse ofte ikke kan brukes i en annen, og at sikkerheten i sertifikatvalidering ikke lar seg teste og kontrollere på en tilfredsstillende måte.
Min overfladiske observasjon av WG er at den enkle bruken av nøkler og kryptoalgoritmer gjør det enklere å f.eks. flytte sin klientkonfigurasjon fra én maskin til den neste. Nøklene har en enkel og kortfattet tekstrepresentasjon som kan overføres gjennom alle slags tekstbasert kanaler. Og jeg ble positivt overrasket over at WG-appene for Windows, Android m.m. var enkle å sette opp og virket tilfredsstillende uten for mye plunder.
Min vurdering er at WireGuard er god egnet for småskala applikasjoner, men har egenskaper som gjør den mindre egnet enn OpenVPN dersom antallet maskiner og klienter er høyt.
Samlede konfigurasjonsfiler
Som et appendix vises her konfigurasjonsopplysninger for hver av de 8 nodene på figuren. Netplan (deklarasjon av IP-adresser), rutingtabell, oversikt over alle nettverksportene, oppstartsskript for WG og WG-konfigurasjonsfil. Noen detaljer i disse filene er ikke blitt behandlet i teksten, f.eks. er nettverket 192.168.100.0/24 brukt som underliggende nettverk for de sorte linkene. Videre er VirtualBox brukt for å kjøre nodene som virtuelle maskiner, og nettverk mellom VM’ene er ikke vist direkte, men i hovedsak er de konfigurert separat for hvert rødt nett, og ett felles for de sorte linkene.
A-h1
KONFIGURASJON AV A-h1:
NETPLAN:
network:
ethernets:
enp0s3:
dhcp4: true
enp0s8:
dhcp4: no
addresses:
- 192.168.10.101/24
routes:
- to: 192.168.20.0/24
via: 192.168.10.1
- to: 192.168.30.0/24
via: 192.168.10.1
version: 2
RUTINGABELL:
Kernel IP routing table
Destination Gateway Genmask Flags Metric Ref Use Iface
default _gateway 0.0.0.0 UG 100 0 0 enp0s3
10.0.2.0 0.0.0.0 255.255.255.0 U 100 0 0 enp0s3
_gateway 0.0.0.0 255.255.255.255 UH 100 0 0 enp0s3
10.0.2.3 0.0.0.0 255.255.255.255 UH 100 0 0 enp0s3
192.168.10.0 0.0.0.0 255.255.255.0 U 0 0 0 enp0s8
192.168.20.0 192.168.10.1 255.255.255.0 UG 0 0 0 enp0s8
192.168.30.0 192.168.10.1 255.255.255.0 UG 0 0 0 enp0s8
IP ADRESSER:
1: lo: <LOOPBACK,UP,LOWER_UP> mtu 65536 qdisc noqueue state UNKNOWN group default qlen 1000
inet 127.0.0.1/8 scope host lo
valid_lft forever preferred_lft forever
2: enp0s3: <BROADCAST,MULTICAST,UP,LOWER_UP> mtu 1500 qdisc pfifo_fast state UP group default qlen 1000
inet 10.0.2.15/24 metric 100 brd 10.0.2.255 scope global dynamic enp0s3
valid_lft 85671sec preferred_lft 85671sec
3: enp0s8: <BROADCAST,MULTICAST,UP,LOWER_UP> mtu 1500 qdisc pfifo_fast state UP group default qlen 1000
inet 192.168.10.101/24 brd 192.168.10.255 scope global enp0s8
valid_lft forever preferred_lft foreverB-h1
KONFIGURASJON AV B-h1
NETPLAN:
network:
ethernets:
enp0s3:
dhcp4: true
enp0s8:
dhcp4: no
addresses:
- 192.168.20.101/24
routes:
- to: 192.168.10.0/24
via: 192.168.20.1
- to: 192.168.30.0/24
via: 192.168.20.1
version: 2
RUTINGTABELL:
Destination Gateway Genmask Flags Metric Ref Use Iface
0.0.0.0 10.0.2.2 0.0.0.0 UG 100 0 0 enp0s3
10.0.2.0 0.0.0.0 255.255.255.0 U 100 0 0 enp0s3
10.0.2.2 0.0.0.0 255.255.255.255 UH 100 0 0 enp0s3
10.0.2.3 0.0.0.0 255.255.255.255 UH 100 0 0 enp0s3
192.168.10.0 192.168.20.1 255.255.255.0 UG 0 0 0 enp0s8
192.168.20.0 0.0.0.0 255.255.255.0 U 0 0 0 enp0s8
192.168.30.0 192.168.20.1 255.255.255.0 UG 0 0 0 enp0s8
IP-ADRESSER:
1: lo: <LOOPBACK,UP,LOWER_UP> mtu 65536 qdisc noqueue state UNKNOWN group default qlen 1000
inet 127.0.0.1/8 scope host lo
valid_lft forever preferred_lft forever
2: enp0s3: <BROADCAST,MULTICAST,UP,LOWER_UP> mtu 1500 qdisc pfifo_fast state UP group default qlen 1000
inet 10.0.2.15/24 metric 100 brd 10.0.2.255 scope global dynamic enp0s3
valid_lft 84917sec preferred_lft 84917sec
3: enp0s8: <BROADCAST,MULTICAST,UP,LOWER_UP> mtu 1500 qdisc pfifo_fast state UP group default qlen 1000
inet 192.168.20.101/24 brd 192.168.20.255 scope global enp0s8
valid_lft forever preferred_lft forever
C-h1
KONFIGURASJON AV C-h1:
NETPLAN:
network:
ethernets:
enp0s3:
dhcp4: true
enp0s8:
dhcp4: no
addresses:
- 192.168.30.101/24
routes:
- to: 192.168.10.0/24
via: 192.168.30.1
- to: 192.168.20.0/24
via: 192.168.30.1
version: 2
RUTINGTABELL:
Destination Gateway Genmask Flags Metric Ref Use Iface
default _gateway 0.0.0.0 UG 100 0 0 enp0s3
10.0.2.0 0.0.0.0 255.255.255.0 U 100 0 0 enp0s3
_gateway 0.0.0.0 255.255.255.255 UH 100 0 0 enp0s3
10.0.2.3 0.0.0.0 255.255.255.255 UH 100 0 0 enp0s3
192.168.10.0 192.168.30.1 255.255.255.0 UG 0 0 0 enp0s8
192.168.20.0 192.168.30.1 255.255.255.0 UG 0 0 0 enp0s8
192.168.30.0 0.0.0.0 255.255.255.0 U 0 0 0 enp0s8
IP-ADRESSER:
1: lo: <LOOPBACK,UP,LOWER_UP> mtu 65536 qdisc noqueue state UNKNOWN group default qlen 1000
inet 127.0.0.1/8 scope host lo
valid_lft forever preferred_lft forever
2: enp0s3: <BROADCAST,MULTICAST,UP,LOWER_UP> mtu 1500 qdisc pfifo_fast state UP group default qlen 1000
inet 10.0.2.15/24 metric 100 brd 10.0.2.255 scope global dynamic enp0s3
valid_lft 84260sec preferred_lft 84260sec
3: enp0s8: <BROADCAST,MULTICAST,UP,LOWER_UP> mtu 1500 qdisc pfifo_fast state UP group default qlen 1000
inet 192.168.30.101/24 brd 192.168.30.255 scope global enp0s8
valid_lft forever preferred_lft foreverA-vpn
KONFIGURASJON AV A-vpn:
NETPLAN:
network:
ethernets:
enp0s3:
dhcp4: true
enp0s8:
dhcp4: no
addresses:
- 192.168.10.1/24
enp0s9:
dhcp4: no
addresses:
- 192.168.100.1/28
version: 2
RUTINGTABELL:
Destination Gateway Genmask Flags Metric Ref Use Iface
0.0.0.0 10.0.2.2 0.0.0.0 UG 100 0 0 enp0s3
10.0.2.0 0.0.0.0 255.255.255.0 U 100 0 0 enp0s3
10.0.2.2 0.0.0.0 255.255.255.255 UH 100 0 0 enp0s3
10.0.2.3 0.0.0.0 255.255.255.255 UH 100 0 0 enp0s3
10.11.12.0 0.0.0.0 255.255.255.252 U 0 0 0 wg1
10.11.12.4 0.0.0.0 255.255.255.252 U 0 0 0 wg2
192.168.10.0 0.0.0.0 255.255.255.0 U 0 0 0 enp0s8
192.168.20.0 10.11.12.1 255.255.255.0 UG 0 0 0 wg1
192.168.30.0 10.11.12.5 255.255.255.0 UG 0 0 0 wg2
192.168.100.0 0.0.0.0 255.255.255.240 U 0 0 0 enp0s9
IP-ADRESSER:
1: lo: <LOOPBACK,UP,LOWER_UP> mtu 65536 qdisc noqueue state UNKNOWN group default qlen 1000
inet 127.0.0.1/8 scope host lo
valid_lft forever preferred_lft forever
2: enp0s3: <BROADCAST,MULTICAST,UP,LOWER_UP> mtu 1500 qdisc pfifo_fast state UP group default qlen 1000
inet 10.0.2.15/24 metric 100 brd 10.0.2.255 scope global dynamic enp0s3
valid_lft 83258sec preferred_lft 83258sec
3: enp0s8: <BROADCAST,MULTICAST,UP,LOWER_UP> mtu 1500 qdisc pfifo_fast state UP group default qlen 1000
inet 192.168.10.1/24 brd 192.168.10.255 scope global enp0s8
valid_lft forever preferred_lft forever
4: enp0s9: <BROADCAST,MULTICAST,UP,LOWER_UP> mtu 1500 qdisc pfifo_fast state UP group default qlen 1000
inet 192.168.100.1/28 brd 192.168.100.15 scope global enp0s9
valid_lft forever preferred_lft forever
5: wg1: <POINTOPOINT,NOARP,UP,LOWER_UP> mtu 1420 qdisc noqueue state UNKNOWN group default qlen 1000
inet 10.11.12.1/30 scope global wg1
valid_lft forever preferred_lft forever
6: wg2: <POINTOPOINT,NOARP,UP,LOWER_UP> mtu 1420 qdisc noqueue state UNKNOWN group default qlen 1000
inet 10.11.12.5/30 scope global wg2
valid_lft forever preferred_lft forever
STARTSKRIPT:
# Create link to AVPN
ip link del wg1 || true
ip link add wg1 type wireguard
ip addr add 10.11.12.1/30 dev wg1
ip link set up wg1
wg setconf wg1 wg1.conf
ip route add 192.168.20.0/24 via 10.11.12.1
# Create link to CVPN
ip link del wg2 || true
ip link add wg2 type wireguard
ip addr add 10.11.12.5/30 dev wg2
ip link set up wg2
wg setconf wg2 wg2.conf
ip route add 192.168.30.0/24 via 10.11.12.5
WG1.CONF:
[interface]
privateKey = iD9fo3ezXcn8njwhmireyxea6vP9HA8s0rVWf9Wjcl4=
listenPort = 51820
[peer]
publicKey = EIhO9XcyQG8yYvlR11aORUQ8NBYGcQMI0yHeguPfeh8=
allowedIPs = 10.11.12.2/32
allowedIPs = 192.168.20.0/24
endpoint = 192.168.100.2:51820
WG2.CONF
[interface]
privateKey = iD9fo3ezXcn8njwhmireyxea6vP9HA8s0rVWf9Wjcl4=
listenPort = 51821
[peer]
publicKey = 6tl3fRAgUPDhAqOrT0Nr2tyIecp7UDgpl2nKh0n1+HM=
allowedIPs = 10.11.12.6/32
allowedIPs = 192.168.30.0/24
endpoint = 192.168.100.3:51821B-vpn
KONFIGURASJON AV B-vpn:
NETPLAN:
network:
ethernets:
enp0s3:
dhcp4: true
enp0s8:
dhcp4: no
addresses:
- 192.168.20.1/24
enp0s9:
dhcp4: no
addresses:
- 192.168.100.2/28
version: 2
RUTINGTABELL:
Destination Gateway Genmask Flags Metric Ref Use Iface
0.0.0.0 10.0.2.2 0.0.0.0 UG 100 0 0 enp0s3
10.0.2.0 0.0.0.0 255.255.255.0 U 100 0 0 enp0s3
10.0.2.2 0.0.0.0 255.255.255.255 UH 100 0 0 enp0s3
10.0.2.3 0.0.0.0 255.255.255.255 UH 100 0 0 enp0s3
10.11.12.0 0.0.0.0 255.255.255.252 U 0 0 0 wg1
192.168.10.0 10.11.12.2 255.255.255.0 UG 0 0 0 wg1
192.168.20.0 0.0.0.0 255.255.255.0 U 0 0 0 enp0s8
192.168.30.0 10.11.12.2 255.255.255.0 UG 0 0 0 wg1
192.168.100.0 0.0.0.0 255.255.255.240 U 0 0 0 enp0s9
IP-ADRESSER:
1: lo: <LOOPBACK,UP,LOWER_UP> mtu 65536 qdisc noqueue state UNKNOWN group default qlen 1000
inet 127.0.0.1/8 scope host lo
valid_lft forever preferred_lft forever
2: enp0s3: <BROADCAST,MULTICAST,UP,LOWER_UP> mtu 1500 qdisc pfifo_fast state UP group default qlen 1000
inet 10.0.2.15/24 metric 100 brd 10.0.2.255 scope global dynamic enp0s3
valid_lft 85780sec preferred_lft 85780sec
3: enp0s8: <BROADCAST,MULTICAST,UP,LOWER_UP> mtu 1500 qdisc pfifo_fast state UP group default qlen 1000
inet 192.168.20.1/24 brd 192.168.20.255 scope global enp0s8
valid_lft forever preferred_lft forever
4: enp0s9: <BROADCAST,MULTICAST,UP,LOWER_UP> mtu 1500 qdisc pfifo_fast state UP group default qlen 1000
inet 192.168.100.2/28 brd 192.168.100.15 scope global enp0s9
valid_lft forever preferred_lft forever
5: wg1: <POINTOPOINT,NOARP,UP,LOWER_UP> mtu 1420 qdisc noqueue state UNKNOWN group default qlen 1000
inet 10.11.12.2/30 scope global wg1
valid_lft forever preferred_lft forever
STARTSKRIPT:
ip link del wg1 || true
ip link add wg1 type wireguard
ip addr add 10.11.12.2/30 dev wg1
ip link set up wg1
wg setconf wg1 wg1.conf
ip route add 192.168.10/24 via 10.11.12.2
ip route add 192.168.30/24 via 10.11.12.2
WG1.CONF
[interface]
privateKey = GBXJpAu9SV+5HGQKitiur1By0lVDSA2WtT7JSN2iLF8=
listenPort = 51820
[peer]
publicKey = AGlXvCzKsYF7rooofmzNbIB3tSHUJ6R5vkyTd1+BUlc=
allowedIPs = 10.11.12.1/32
allowedIPs = 192.168.10.0/24
allowedIPs = 192.168.30.0/24
endpoint = 192.168.100.1:51820
C-vpn
KONFIGURASJON AV C-vpn:
NETPLAN:
network:
ethernets:
enp0s3:
dhcp4: true
enp0s8:
dhcp4: no
addresses:
- 192.168.30.1/24
enp0s9:
dhcp4: no
addresses:
- 192.168.100.3/28
version: 2
RUTINGTABELL:
Destination Gateway Genmask Flags Metric Ref Use Iface
default _gateway 0.0.0.0 UG 100 0 0 enp0s3
10.0.2.0 0.0.0.0 255.255.255.0 U 100 0 0 enp0s3
_gateway 0.0.0.0 255.255.255.255 UH 100 0 0 enp0s3
10.0.2.3 0.0.0.0 255.255.255.255 UH 100 0 0 enp0s3
10.11.12.4 0.0.0.0 255.255.255.252 U 0 0 0 wg1
192.168.10.0 10.11.12.6 255.255.255.0 UG 0 0 0 wg1
192.168.20.0 10.11.12.6 255.255.255.0 UG 0 0 0 wg1
192.168.30.0 0.0.0.0 255.255.255.0 U 0 0 0 enp0s8
192.168.100.0 0.0.0.0 255.255.255.240 U 0 0 0 enp0s9
IP-ADRESSER:
1: lo: <LOOPBACK,UP,LOWER_UP> mtu 65536 qdisc noqueue state UNKNOWN group default qlen 1000
inet 127.0.0.1/8 scope host lo
valid_lft forever preferred_lft forever
2: enp0s3: <BROADCAST,MULTICAST,UP,LOWER_UP> mtu 1500 qdisc pfifo_fast state UP group default qlen 1000
inet 10.0.2.15/24 metric 100 brd 10.0.2.255 scope global dynamic enp0s3
valid_lft 85155sec preferred_lft 85155sec
3: enp0s8: <BROADCAST,MULTICAST,UP,LOWER_UP> mtu 1500 qdisc pfifo_fast state UP group default qlen 1000
inet 192.168.30.1/24 brd 192.168.30.255 scope global enp0s8
valid_lft forever preferred_lft forever
4: enp0s9: <BROADCAST,MULTICAST,UP,LOWER_UP> mtu 1500 qdisc pfifo_fast state UP group default qlen 1000
inet 192.168.100.3/28 brd 192.168.100.15 scope global enp0s9
valid_lft forever preferred_lft forever
5: wg1: <POINTOPOINT,NOARP,UP,LOWER_UP> mtu 1420 qdisc noqueue state UNKNOWN group default qlen 1000
inet 10.11.12.6/30 scope global wg1
valid_lft forever preferred_lft forever
STARTSKRIPT:
ip link del wg1 || true
ip link add wg1 type wireguard
ip addr add 10.11.12.6/30 dev wg1
ip link set up wg1
wg setconf wg1 wg1.conf
ip route add 192.168.10.0/24 via 10.11.12.6
ip route add 192.168.20.0/24 via 10.11.12.6
WG1.CONF
[interface]
privateKey = gOhx12lAqnqcVOF9qVXeaQlaDuMsOumDvAUpoSF4O1I=
listenPort = 51821
[peer]
publicKey = AGlXvCzKsYF7rooofmzNbIB3tSHUJ6R5vkyTd1+BUlc=
allowedIPs = 10.11.12.5/32
allowedIPs = 192.168.10.0/24
allowedIPs = 192.168.20.0/24
endpoint = 192.168.100.1:51821
D-vpn
KONFIGURASJON AV D-vpn:
NETPLAN:
network:
ethernets:
enp0s3:
dhcp4: true
enp0s8:
dhcp4: no
addresses:
- 192.168.10.2/24
routes:
- to: 192.168.20.0/24
via: 192.168.10.1
- to: 192.168.30.0/24
via: 192.168.10.1
enp0s9:
dhcp4: no
addresses:
- 192.168.2.9/24
version: 2
RUTINGTABELL:
Destination Gateway Genmask Flags Metric Ref Use Iface
default _gateway 0.0.0.0 UG 100 0 0 enp0s3
10.0.2.0 0.0.0.0 255.255.255.0 U 100 0 0 enp0s3
_gateway 0.0.0.0 255.255.255.255 UH 100 0 0 enp0s3
10.0.2.3 0.0.0.0 255.255.255.255 UH 100 0 0 enp0s3
192.168.2.0 0.0.0.0 255.255.255.0 U 0 0 0 enp0s9
192.168.10.0 0.0.0.0 255.255.255.0 U 0 0 0 enp0s8
192.168.20.0 192.168.10.1 255.255.255.0 UG 0 0 0 enp0s8
192.168.30.0 192.168.10.1 255.255.255.0 UG 0 0 0 enp0s8
IP-ADRESSER:
1: lo: <LOOPBACK,UP,LOWER_UP> mtu 65536 qdisc noqueue state UNKNOWN group default qlen 1000
inet 127.0.0.1/8 scope host lo
valid_lft forever preferred_lft forever
2: enp0s3: <BROADCAST,MULTICAST,UP,LOWER_UP> mtu 1500 qdisc pfifo_fast state UP group default qlen 1000
inet 10.0.2.15/24 metric 100 brd 10.0.2.255 scope global dynamic enp0s3
valid_lft 84672sec preferred_lft 84672sec
3: enp0s8: <BROADCAST,MULTICAST,UP,LOWER_UP> mtu 1500 qdisc pfifo_fast state UP group default qlen 1000
inet 192.168.10.2/24 brd 192.168.10.255 scope global enp0s8
valid_lft forever preferred_lft forever
4: enp0s9: <BROADCAST,MULTICAST,UP,LOWER_UP> mtu 1500 qdisc pfifo_fast state UP group default qlen 1000
inet 192.168.2.9/24 brd 192.168.2.255 scope global enp0s9
valid_lft forever preferred_lft forever
STARTSKRIPT:
ip link del wg1 || true
ip link add wg1 type wireguard
ip addr add 10.11.13.1/24 dev wg1
ip link set up wg1
wg setconf wg1 wg1.conf
iptables -t nat -A POSTROUTING -o enp0s8 -j MASQUERADE
WG1.CONF:
[interface]
privateKey = iABCVCYnoe3Hh4xup1L7GPgJ+pEGsN71l+stTq+mamg=
listenPort = 51820
[peer]
# Linux client
publicKey = 3aTXg7SbFDOc7rbscBUqKZsRqoHpvowHRkb+mNwuXRk=
allowedIPs = 10.11.13.2/32
[peer]
# Android client
publicKey = c9pYVjABCNWyA6BhAjUhjnjXtMsR42Bim5G5X+Da+yk=
allowedIPs = 10.11.13.3/32D-rw
KONFIGURASJON AV D-rw:
RUTINGTABELL:
Destination Gateway Genmask Flags Metric Ref Use Iface
0.0.0.0 192.168.2.1 0.0.0.0 UG 100 0 0 enp0s31f6
10.11.13.0 0.0.0.0 255.255.255.0 U 0 0 0 wg1
192.168.2.0 0.0.0.0 255.255.255.0 U 100 0 0 enp0s31f6
192.168.10.0 10.11.13.2 255.255.255.0 UG 0 0 0 wg1
192.168.20.0 10.11.13.2 255.255.255.0 UG 0 0 0 wg1
192.168.30.0 10.11.13.2 255.255.255.0 UG 0 0 0 wg1
IP-ADRESSER:
1: lo: <LOOPBACK,UP,LOWER_UP> mtu 65536 qdisc noqueue state UNKNOWN group default qlen 1000
inet 127.0.0.1/8 scope host lo
valid_lft forever preferred_lft forever
2: enp0s31f6: <BROADCAST,MULTICAST,UP,LOWER_UP> mtu 1500 qdisc fq_codel state UP group default qlen 1000
inet 192.168.2.206/24 brd 192.168.2.255 scope global dynamic noprefixroute enp0s31f6
valid_lft 38451sec preferred_lft 38451sec
3: wg1: <POINTOPOINT,NOARP,UP,LOWER_UP> mtu 1420 qdisc noqueue state UNKNOWN group default qlen 1000
inet 10.11.13.2/24 scope global wg1
valid_lft forever preferred_lft forever
STARTSKRIPT:
ip link del wg1 || true
ip link add wg1 type wireguard
ip addr add 10.11.13.2/24 dev wg1
ip link set up wg1
wg setconf wg1 wg1.conf
ip route add 192.168.10/24 via 10.11.13.2
ip route add 192.168.20/24 via 10.11.13.2
ip route add 192.168.30/24 via 10.11.13.2
WG1.CONF:
[interface]
privateKey = eA8MDscVpkhm/cAJcE8AeOx2+ozz+CeD0OADuFdrznk=
listenPort = 51820
[peer]
publicKey = 76+YJu/TMaGJgh2dEZaB3RasxeZ1fXTPw5a2u9XXAB0=
allowedIPs = 10.11.12.9/32,192.168.0.0/16
endpoint = 192.168.2.9:51820